平衡机如何进行旋转设备的振动模式识别算法
旋转设备的振动模式识别是机械故障诊断和状态监测的重要组成部分。平衡机通过分析旋转部件(如转子)的振动特性来确定其平衡状态,并识别潜在的问题。进行旋转设备的振动模式识别通常涉及到以下几个步骤:
1. 数据采集:
使用传感器(如加速度计、速度传感器或位移传感器)安装在旋转设备的关键位置,以测量振动信号。
选择适当的采样频率,确保能够捕捉到所有感兴趣的频率成分。
2. 信号预处理:
对采集的数据进行滤波,去除噪声和其他不必要的干扰。
可能包括对原始信号进行去均值、归一化等操作。
3. 特征提取:
分析振动信号的时间域特征(如均方根值RMS、峰值、峭度等)。
分析频域特征,如通过快速傅里叶变换(FFT)将时间域信号转换为频域信号,得到频谱图,识别主要的频率成分(例如,旋转频率及其谐波)。
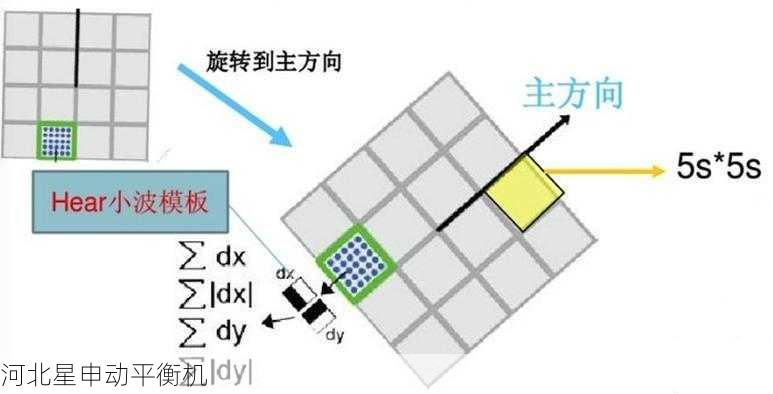
在某些情况下,还可能需要使用时频分析方法(如小波变换),以便处理非稳态信号。
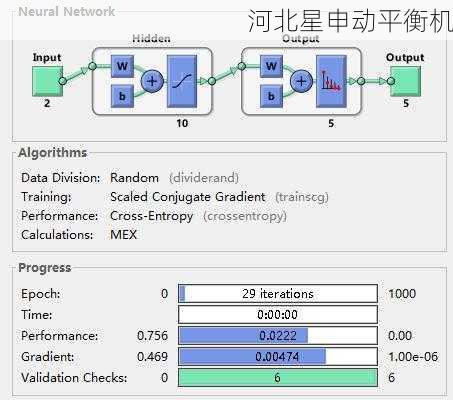
4. 模式识别:
利用机器学习算法(如支持向量机SVM、人工神经网络ANN、决策树等)或者统计模型(如隐马尔可夫模型HMM)根据提取出的特征建立分类模型。
训练模型时,使用已知状态下的振动数据作为训练集,使模型学会区分不同的运行状态或故障模式。
对新采集的数据应用该模型,以识别当前的振动模式是否正常,或是对应于某种特定类型的故障。
5. 结果解释与决策:
根据模式识别的结果,判断设备的工作状态。
如果检测到异常振动模式,则可能需要进一步调查原因,调整平衡或安排维修。
6. 反馈与优化:
随着更多数据的积累和经验的增加,不断优化振动模式识别算法,提高诊断精度。
在实际应用中,上述过程可能会结合专家系统、模糊逻辑、遗传算法等其他技术来增强系统的自适应性和准确性。此外,现代的智能平衡机往往集成有先进的软件工具,可以自动执行从数据采集到模式识别的整个流程,并提供用户友好的界面来展示分析结果。





