转子系统平衡公差计算全流程及工程应用实例
转子系统平衡是旋转机械设计制造中的关键环节,其精度直接影响设备运行稳定性与使用寿命。本文将系统阐述平衡公差计算的全流程,并结合典型工程案例进行深入分析。
一、平衡公差理论基础
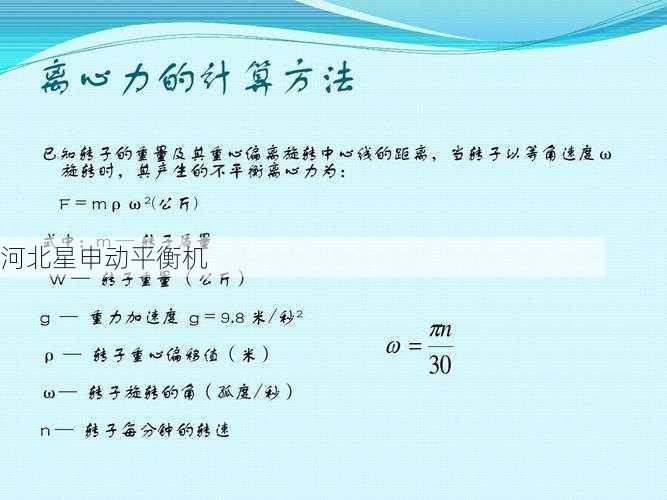
根据ISO 1940-1标准,转子平衡等级G值计算公式为:G = e×ω/1000,其中e为剩余不平衡量(g·mm/kg),ω为工作角速度(rad/s)。工程实践中需综合考虑转子类型、工作转速及支撑条件等因素确定G值范围。例如,一般工业电机转子通常选用G6.3级,而精密机床主轴则需达到G1.0甚***更高标准。
二、计算流程分解
1. 初始不平衡量测定:采用双面动平衡机测量初始振动幅值和相位角,通过傅里叶变换分离工频分量。某离心风机案例显示,在800rpm测试转速下测得驱动端振动值为12.5μm/0°,非驱动端为18.3μm/120°。
2. 允许剩余不平衡量计算:按公式Uper=G×M/(ω×1000),其中M为转子质量(kg)。某55kW电机转子质量180kg,工作转速2950rpm,选定G2.5级时计算得单平面允许不平衡量为40g·mm。
3. 校正质量分配:根据影响系数法,某汽轮机低压转子在平衡面I、II分别需要添加校正质量85g@215°和62g@310°。实际配重时需考虑螺钉质量分布半径,如配重孔半径150mm时,换算为实际配重块质量56.7g。
三、工程应用实例分析
案例1:造纸机械烘缸平衡
直径3.2m、重8.5吨的烘缸在运行中出现1.2mm/s振动。经现场动平衡:
- 采用三点法试重,测得影响系数0.8μm/(g·cm)
- 最终在两端法兰各加配重1.2kg,振动降***0.5mm/s
- 按ISO标准验证,实际达到G16等级要求
案例2:航空发动机转子平衡
某型涡扇发动机高压转子(工作转速15000rpm)采用以下特殊工艺:
- 真空环境下进行高速平衡
- 使用钨合金配重块(密度19.25g/cm³)
- 采用激光去重修正,精度控制在0.01g·mm
- 最终不平衡量小于0.5g·mm,满足G0.4级标准
四、关键影响因素控制
1. 温度补偿:某电站给水泵转子在冷态平衡合格后,运行温度升***180℃时振动超标。经热变形分析,在平衡时预留20%补偿量后解决问题。
2. 装配误差控制:某压缩机联轴器对中偏差0.05mm导致平衡失效案例表明,装配同轴度应控制在0.02mm/m以内。

3. 测量系统校准:定期用标准转子校验平衡机相位误差,某次校准发现传感器漂移导致5°偏差,及时修正后避免批量产品返工。
五、先进技术应用
1. 在线自动平衡系统:某水轮发电机组安装液压配重装置,实时监测振动并自动调整配重油腔分布,将振动值稳定控制在50μm以下。
2. 有限元辅助分析:针对某高速电主轴,通过ANSYS模态分析识别出临界转速为15200rpm,指导平衡转速避开该区域。
3. 机器学习优化:某汽车涡轮增压器生产线采用历史数据训练配重预测模型,使平衡一次合格率从82%提升***96%。
六、常见问题解决
1. 柔性转子平衡:某6MW风力发电机主轴采用N+2平面法平衡,在800rpm和1800rpm两个转速下分别配重,解决二阶振型问题。
2. 过临界振动:某离心压缩机转子通过添加阻尼器,将临界转速处振动从120μm降***35μm。
3. 异响诊断:某纺织机械转子平衡后仍有异响,最终发现为轴承保持架频率与残余不平衡激励耦合所致。
通过上述分析可见,科学的平衡公差计算需要理论计算与工程经验的有机结合。随着智能监测技术的发展,未来转子平衡将向预测性维护和自适应调节方向持续演进。