从生物力学到工程实践:仿生机器人关节平衡技术研究
仿生机器人关节平衡技术作为当前机器人研究领域的前沿课题,其发展历程体现了从生物观察到工程实现的完整创新链条。这项技术通过模仿生物体的运动机制,将生物力学原理转化为工程实践,在医疗康复、特种作业等领域展现出广阔的应用前景。

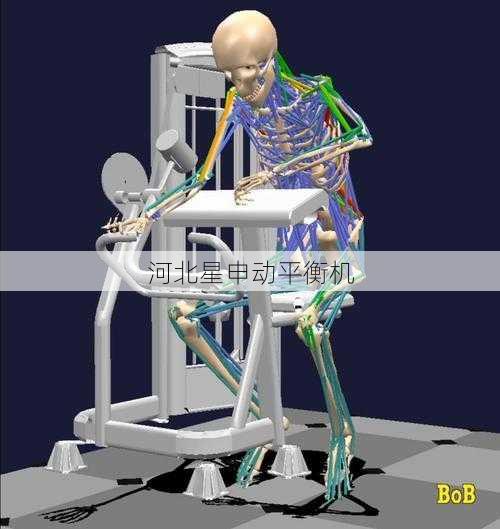
从生物力学基础来看,自然界中生物关节的平衡机制具有惊人的精巧性。以人类膝关节为例,其稳定性不仅依赖于骨骼结构的精密咬合,更通过韧带网络的张力调节和肌肉群的协同收缩实现动态平衡。研究表明,人体在站立时通过腓肠肌和比目鱼肌的微幅调整,能以极低的能耗维持直立姿态,这种生物力学特性为仿生关节设计提供了重要启示。
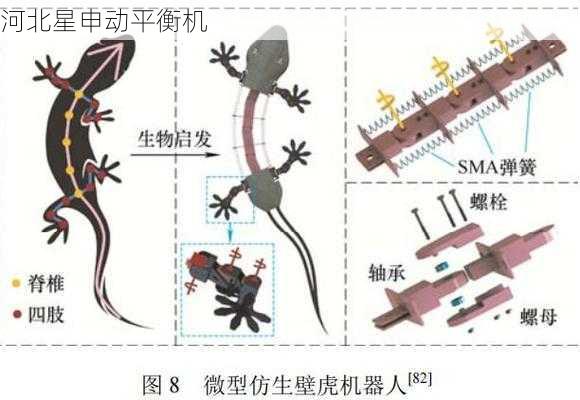
工程实践中,仿生关节平衡技术的核心挑战在于如何复现生物系统的三个关键特性:首先是自适应能力,要求关节能够根据载荷变化实时调整刚度;其次是能量效率,需要在保持稳定性的同时最小化能耗;最后是容错性,确保在部分元件失效时仍能维持基本功能。目前主流解决方案包括基于形状记忆合金的被动调节机构、采用液压仿生肌肉的主动控制系统,以及融合多种传感器的智能反馈体系。
在具体技术实现层面,研究人员开发了多种创新结构。例如借鉴节肢动物外骨骼的分段式关节设计,通过多自由度铰链结构实现类似生物关节的复合运动;模仿哺乳动物肌腱的弹性储能机构,在运动过程中实现动能与弹性势能的高效转换;还有受人类前庭系统启发的姿态感知系统,通过微机电传感器阵列实时监测关节空间状态。
控制算法的突破同样是技术发展的关键。现代仿生机器人普遍采用分层控制系统架构:底层基于PID控制实现关节位置***调节,中层运用阻抗控制模拟生物肌肉的刚度特性,高层通过强化学习算法优化整体运动策略。这种架构使得机器人能够像生物体一样,在受到外力干扰时自动调整关节力矩分配,保持动态平衡。
材料科学的进步为仿生关节提供了新的可能性。具有可变刚度的智能材料如磁流变弹性体,能够在外加磁场作用下实现模量的快速调节;仿生聚合物纤维可以模拟肌肉的收缩特性;而3D打印技术则允许制造具有复杂内部结构的轻量化关节部件。这些新材料与新工艺的结合,大幅提升了仿生关节的性能边界。
在实际应用方面,仿生平衡技术已取得显著成效。在医疗领域,外骨骼机器人通过仿生膝关节帮助截瘫患者重新站立行走;在工业场景,具备自适应平衡能力的机械臂能够在振动环境下保持末端执行器的稳定;而特种机器人则利用该技术在复杂地形中维持姿态稳定。值得关注的是,这些应用都要求仿生关节在不确定环境中表现出类生物体的鲁棒性。
当前研究面临的主要技术瓶颈包括:生物信号到工程参数的转换精度不足,仿生机构的耐久性与生物组织存在差距,以及多模态传感信息的融合效率有待提升。针对这些挑战,跨学科的研究团队正在探索新的解决方案,如基于深度学习的运动预测模型、受生物启发的自修复材料等。
未来发展趋势呈现三个明显特征:一是仿生尺度向微观延伸,开始关注细胞骨架的力学特性;二是硬件与算法的协同优化,追求更高层次的类生命行为;三是与脑机接口技术的融合,实现更直接的运动意图识别。可以预见,随着对生物机理认识的深入和工程技术的进步,仿生关节平衡技术将不断突破现有性能极限。
这项技术的发展也带来了深刻的工程哲学思考。在模仿自然的过程中,工程师们逐渐意识到,单纯的形态复制难以达到理想的性能表现,必须深入理解生物系统背后的力学原理和进化逻辑。这种认识促使研究范式从表面仿生向原理仿生转变,标志着仿生工程学正在走向成熟。
从更广阔的视角看,仿生机器人关节平衡技术的研究不仅推动了工程进步,也为理解生物运动机制提供了新的实验平台。这种双向的知识流动,正在模糊生物学与工程学的传统界限,催生出一个充满活力的交叉研究领域。随着技术的持续发展,仿生平衡技术有望在更多应用场景中实现突破,为机器人技术开辟新的可能性。