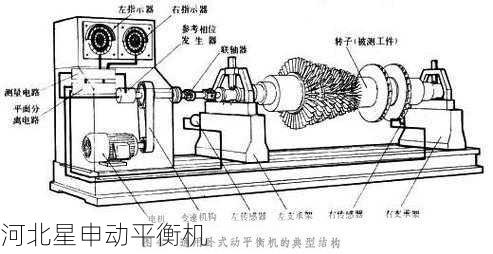
如何通过平衡机进行旋转部件的不平衡位置识别
旋转部件的不平衡可以通过平衡机进行检测和校正。不平衡位置的识别是平衡过程中的关键步骤,它帮助确定需要添加或移除配重的位置,以达到旋转部件的动态平衡。以下是通过平衡机进行不平衡位置识别的基本步骤:

1. 准备阶段:
选择合适的平衡机:根据旋转部件的尺寸、重量以及转速选择适合的平衡机。
安装部件:将待测旋转部件按照制造商推荐的方式安装到平衡机上。
2. 初步设置:
输入参数:向平衡机输入被测试件的相关信息(如质量、直径等)。
校准平衡机:确保平衡机本身处于良好的工作状态,并进行了适当的校准。
3. 运行测试:
启动平衡机,让旋转部件在设定的速度下运转。
平衡机会测量由于不平衡引起的振动信号。
4. 数据采集与分析:
在一定的速度下,平衡机会记录下由不平衡引起的振动力大小及相位角。
通过内置软件计算出不平衡量的具体数值及其相对于参考点的角度位置。
5. 不平衡位置标识:
根据收集的数据,平衡机会显示出不平衡的位置。这通常是以角度形式给出的,比如“不平衡位于X度”。
对于一些先进的平衡系统,还可能直接在屏幕上显示不平衡区域或者使用激光指示器来指出具体的位置。
6. 调整与再测试:

根据不平衡位置的信息,在指定地点增加或减少相应的质量(通常是通过粘贴/焊接金属块或是钻孔去除材料)。
再次启动平衡机对部件进行测试,直到达到满意的平衡标准为止。
7. 最终检查:
当不平衡量降***可接受范围内后,停止机器并拆卸已平衡好的组件。
可能还需要进一步的手动微调以保证***效果。
请注意,不同类型和品牌的平衡机可能具有不同的操作流程和技术特点,请参照所使用的设备说明书执行正确的操作程序。此外,对于高精度要求的应用场景,建议由专业人员来进行操作。





