转子动力学在平衡机中的应用解析:如何实现更高效精准的动平衡校正
转子动力学作为机械工程领域的重要分支,在旋转机械的设计、制造和维护中发挥着关键作用。特别是在动平衡校正领域,转子动力学的理论研究和实践应用直接影响着平衡机的工作效率和校正精度。本文将深入探讨转子动力学原理在平衡机中的具体应用,分析实现高效精准动平衡的技术路径。
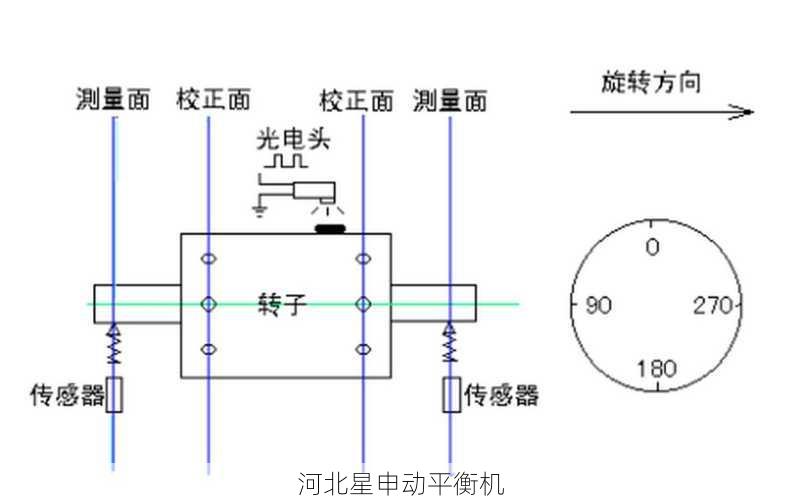
在旋转机械运行过程中,转子不平衡是引发振动和噪声的主要原因。根据转子动力学理论,当转子质量分布不均匀时,旋转产生的离心力会导致系统振动加剧。这种振动不仅影响设备运行精度,还可能引发机械故障。平衡机正是基于转子动力学原理,通过测量振动信号来识别不平衡量的大小和相位,进而指导校正操作。
现代平衡机系统通常采用硬支承或软支承两种结构设计。硬支承平衡机基于刚性转子假设,其支承刚度远大于转子临界转速对应的动力刚度,适用于工作转速远低于临界转速的转子。而软支承平衡机则允许支承系统在测量过程中产生明显的振动位移,通过测量振动幅值和相位来反推不平衡量,更适合于柔性转子的平衡校正。
实现高效动平衡校正的关键在于***的不平衡量测量。先进的平衡机系统采用多传感器融合技术,通过布置在支承部位的振动传感器采集时域信号,再经过快速傅里叶变换(FFT)转换为频域信息。转子动力学中的模态分析理论在此过程中发挥重要作用,帮助识别转子的固有频率和振型,从而有效区分不平衡振动与其他干扰振动。
在数据处理环节,现代平衡机普遍采用最小二乘法等优化算法来处理测量数据。通过建立转子系统的动力学模型,将实测振动数据与理论模型进行比对和迭代计算,可以显著提高不平衡量识别的准确性。特别对于具有多个校正平面的复杂转子系统,这种基于模型的计算方法能够有效解决平面分离难题。
校正精度提升的另一重要因素是转速控制策略。根据转子动力学原理,转子的不平衡响应与转速密切相关。先进的平衡机采用闭环转速控制系统,能够在测量过程中保持转速稳定,避免因转速波动导致的测量误差。对于柔性转子,还需要考虑临界转速的影响,采用变速测量技术获取完整的振动响应曲线。
人机交互界面的优化也是提高平衡效率的重要因素。现代平衡机配备智能化操作软件,能够直观显示不平衡量的幅值和相位信息,并提供校正建议。部分高端系统还具备学习功能,可以记录历史平衡数据,为同类转子的后续平衡提供参考依据,显著缩短平衡时间。
在实际应用中,环境因素对平衡精度的影响不容忽视。振动干扰、温度变化等因素都可能影响测量结果。为此,先进的平衡机系统采用多种抗干扰技术,如数字滤波、温度补偿等,确保在各种工况下都能获得可靠的测量数据。
未来发展趋势显示,智能化、网络化将成为平衡机技术升级的主要方向。通过引入人工智能算法,平衡机可以自动优化测量方案和校正策略;而物联网技术的应用则使远程监控和故障诊断成为可能。这些创新都将进一步推动动平衡校正技术向着更高效、更精准的方向发展。
转子动力学理论为平衡机技术发展提供了坚实的理论基础。通过持续优化测量方法、完善算法模型、提升系统集成度,现代平衡机已经能够满足各种复杂转子的动平衡需求。随着技术的不断进步,动平衡校正的精度和效率还将得到进一步提升,为旋转机械的安全稳定运行提供更有力的保障。